

Gleichstrommaschine
Gleichstrommaschinen sind Elektromaschinen, die mit Gleichstrom betrieben werden und sowohl als Motoren als auch als Generatoren verwendet werden können. Sie zeichnen sich durch eine präzise Steuerbarkeit der Drehzahl und des Drehmoments aus, was sie ideal für Anwendungen mit variabler Geschwindigkeit und Last macht. Gleichstrommaschinen besitzen ein hohes Anlaufdrehmoment und ermöglichen eine einfache Umkehr der Drehrichtung. Sie werden häufig in Elektrofahrzeugen, industriellen Steuerungsanlagen und batteriebetriebenen Geräten eingesetzt.
Vorteile:
- Einfacher und kostengünstiger
Aufbau der Stromrichter - Hohe Regeldynamik
- Direkter Betrieb der Maschine mit
Akkumulatoren möglich - Große Überlastfähigkeit
Nachteile:
- Hoher Konstruktionsaufwand
- Wartungsintensiv (Bürsten)
- Geringe Leistungsdichte
- Kosten
1 Exkurs Prinzip des Elektromotors
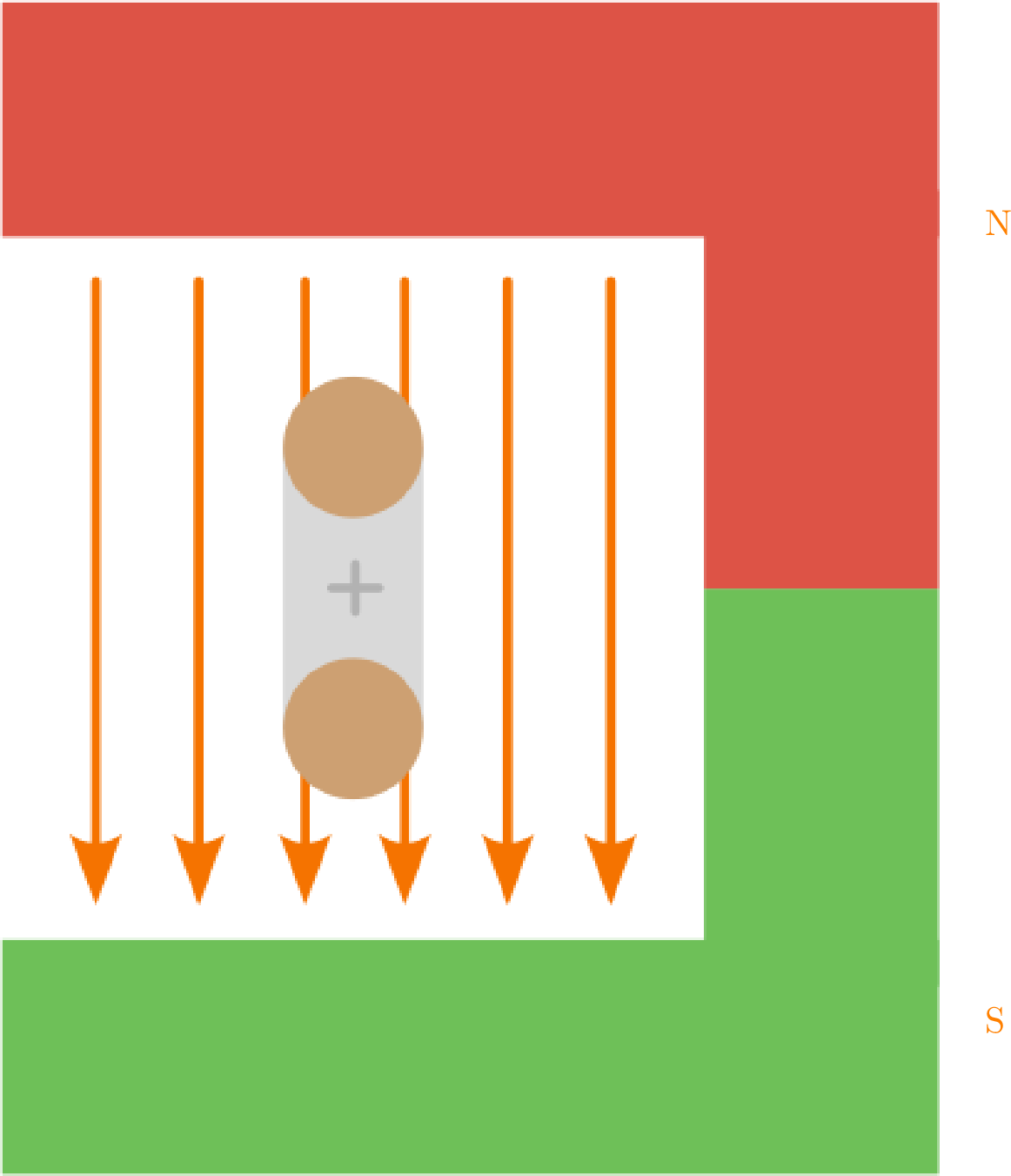
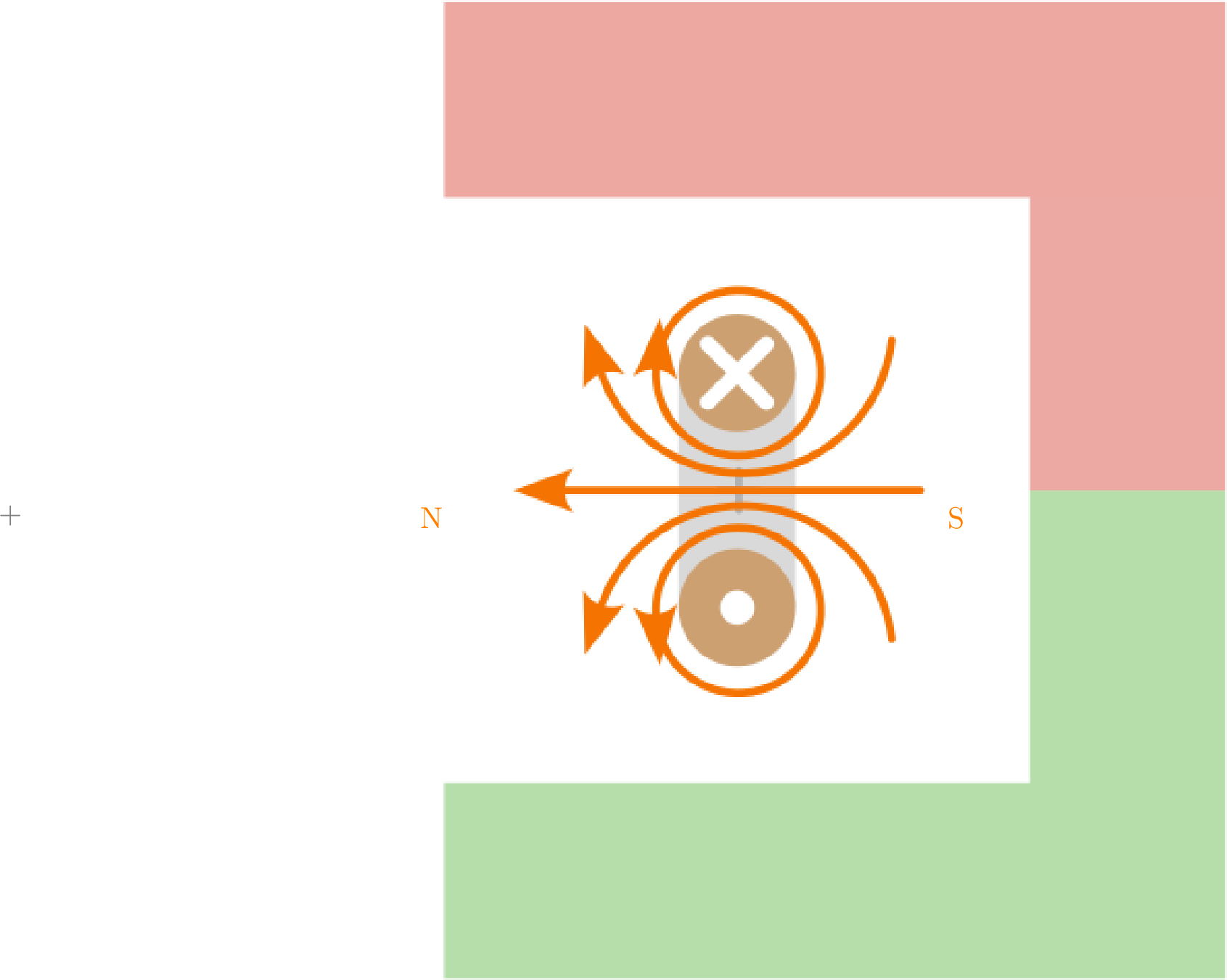
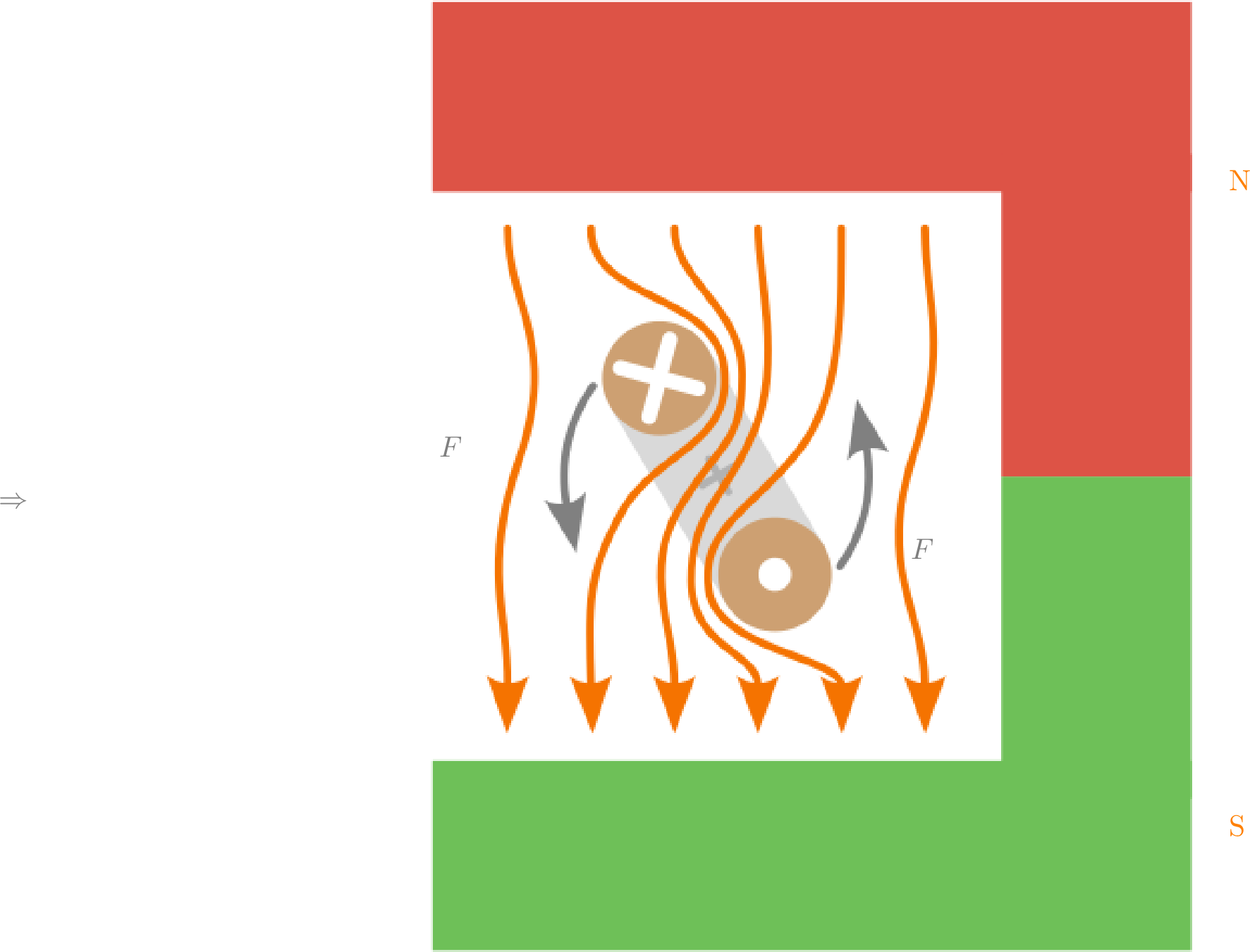
Zu Beginn werden die im Modul 6 vorgestellten Prinzipien aufgefrischt. Die Abbildung 1 zeigt in drei Schaubildern kurzgefasst die Wirkungsweise eines Elektromotors. Zum grundlegenden Aufbau eines Elektromotors gehören ein feststehender Teil, Ständer oder Stator genannt, und ein sich drehender Teil, auch Läufer oder Rotor genannt. In den drei Abbildungen ist eine Leiterspule in einem Hufeisenmagneten zu sehen. Der Hufeisenmagnet bildet hier den Stator, und eine um die eigene Achse bewegliche Leiterspule stellt den Rotor dar. Das erste Schaubild illustriert den isolierten Verlauf der magnetischen Feldlinien des Hufeisenmagneten. Sie verlaufen innerhalb des Hufeisenmagneten vertikal vom Nord- zum Südpol. Das zweite Schaubild zeigt den isolierten Verlauf der magnetischen Feldlinien der stromdurchflossenen Leiterschleife. Durch den Stromfluss entstehen an der Leiterschleife zwei entgegenwirkende Wirbelfelder. Im dritten Schaubild wird die Wechselwirkung des Hufeisenmagneten (Statorfeld) und der stromdurchflossenen Leiterschleife (Rotorfeld) aufgezeigt. Die beiden Felder überlagern sich. Die aus der Überlagerung resultierende Lorentzkraft bringt gemäß der Rechten-Hand-Regel die Leiterschleife zum Rotieren. Aus der elektromagnetischen Energie entsteht mechanische Energie.
Die Lorentzkraft kann mit der aus Modul 6 bekannten Formel berechnet werden: \begin {equation} F =B\cdot I\cdot \ell \cdot N \end {equation}
Beispiel 1: Kraft einer Gleichstrommaschine
Ein Gleichstrommotor hat im Luftspalt eine magnetische Flussdichte von \(B=0,8\,\mathrm {T}\). Unter den Polen
befinden sich insgesamt \(N=400\) Ankerdrähte, die mit einem Strom von \(I=10\,\mathrm {A}\) durchflossen werden. Die
wirksame Leiterlänge ist \(\ell =150\,\mathrm {mm}\).
Berechnen Sie die Kraft \(F\) am Umfang des Ankers.\begin {align*} {F & =B\cdot I\cdot \ell \cdot N } \\ { & =0,8\,\frac {\mathrm {Vs}}{\mathrm {m}^2}\cdot 10\,\mathrm {A}\cdot 0,15\,\mathrm {m}\cdot 400} \\ { & =480\,\frac {\mathrm {kg}\cdot \mathrm {m}^2\cdot \mathrm {s}\cdot \mathrm {A}\cdot \mathrm {m}}{\mathrm {s}^3\cdot \mathrm {A}\cdot \mathrm {m}^2} = 480\,\mathrm {N}} \end {align*}
2 Aufbau und Gehäusekonstruktion
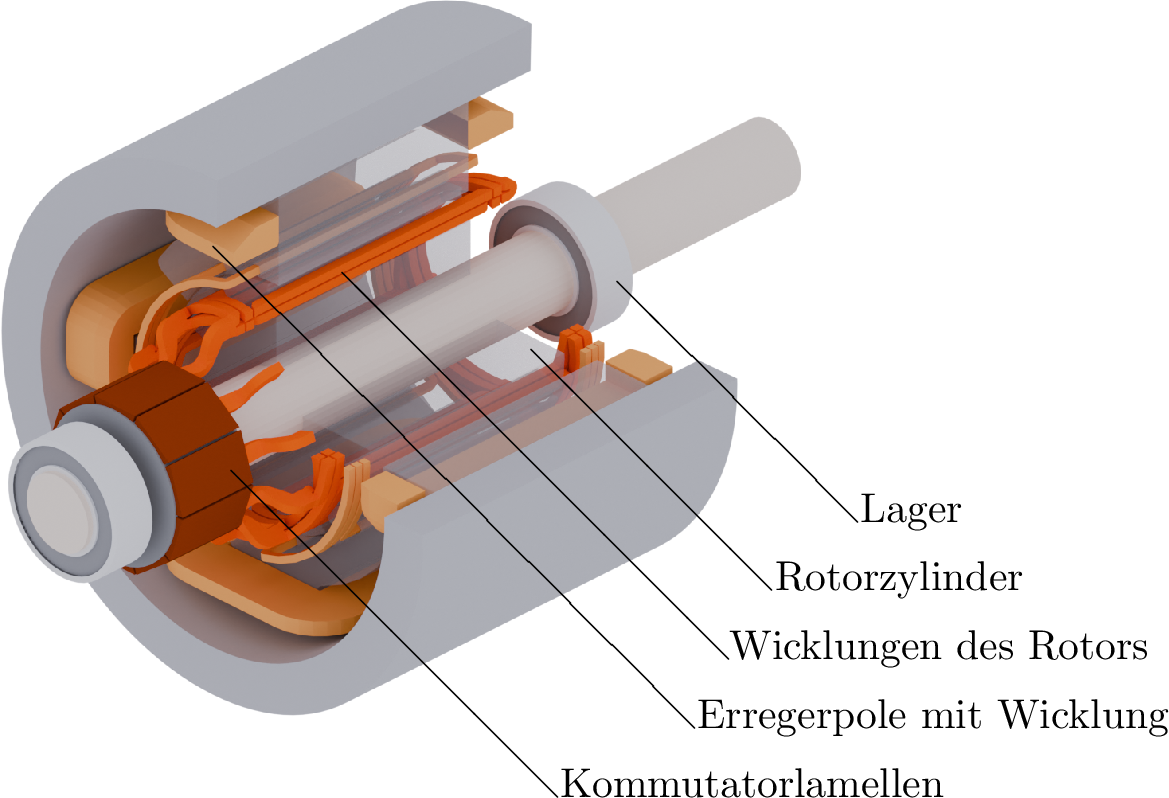
Der Aufbau der Gleichstrommaschine wird anhand dreier Abbildungen dargestellt. Abbildung 2 zeigt ein diagonales Schnittmodell der Gleichstrommaschine, das eine allgemeine Übersicht über die Komponenten von Stator und Rotor gibt. Zur detaillierteren Veranschaulichung des Aufbaus werden die Abbildung 3 mit Fokus auf dem Stator und Abbildung 4 zur Veranschaulichung des Rotors einer Gleichstrommaschine herangezogen.
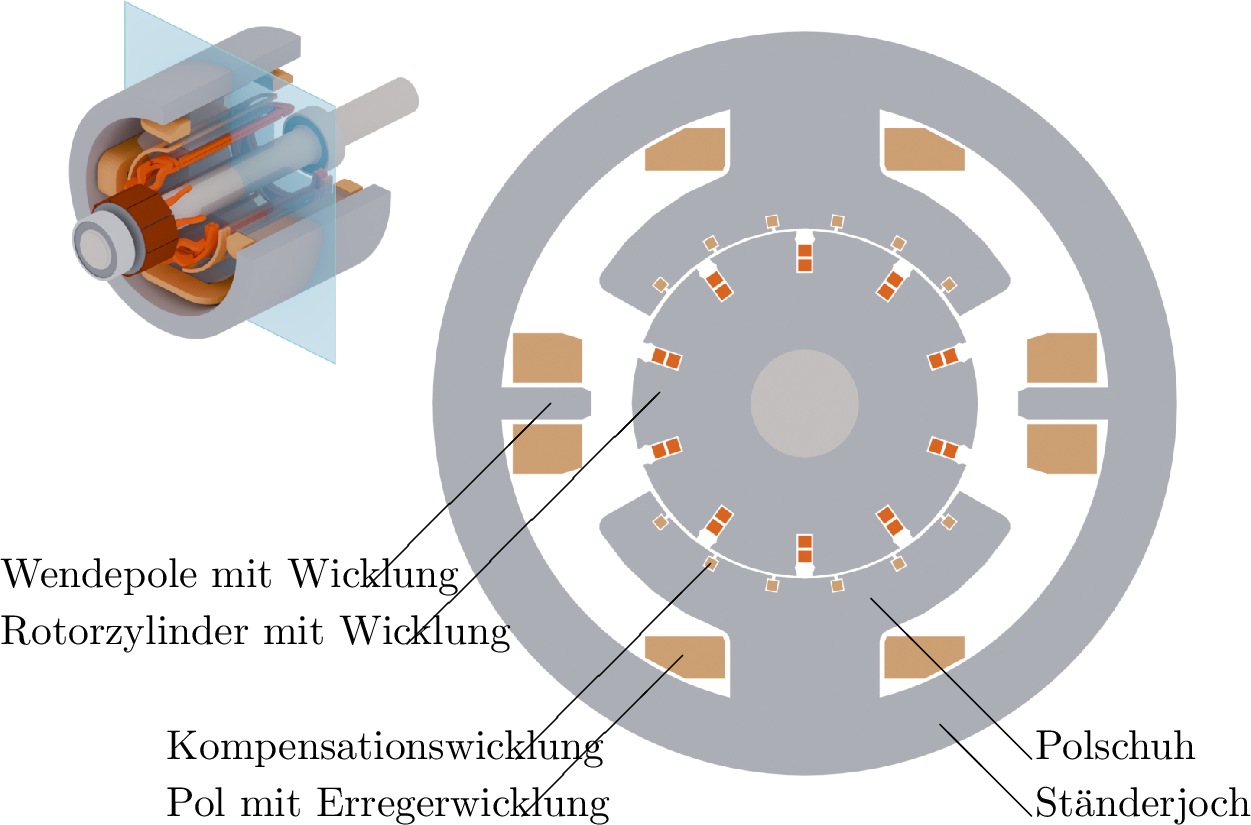
Die Komponenten des Stators, auch Ständer genannt, werden im frontalen Querschnitt einer Gleichstrommaschine (Abbildung 3) gut veranschaulicht. Eine der grundlegenden Komponenten ist die Erregerwicklung, die um einen Polschuh gewunden, einen Pol darstellt. Die Pole haben die Aufgabe, ein Magnetfeld, Erregerfeld genannt, zu erzeugen.
Da ein magnetisches Feld immer einen Nord- und einen Südpol beinhaltet, werden die Pole paarweise gegenüber eingebaut. Die daraus resultierende Kenngröße, die Polpaarzahl, gibt Aufschluss über die Betriebseigenschaften der Gleichstrommaschine. Eine höhere Polpaarzahl verringert die Drehzahl, erhöht jedoch das Drehmoment. Bei Kleinstmaschinen können die Erregerwicklungen durch Permanentmagnete ersetzt werden. Bei größeren Maschinen (ca. über 1 kW) sind zusätzlich Wendepolwicklungen vorhanden.
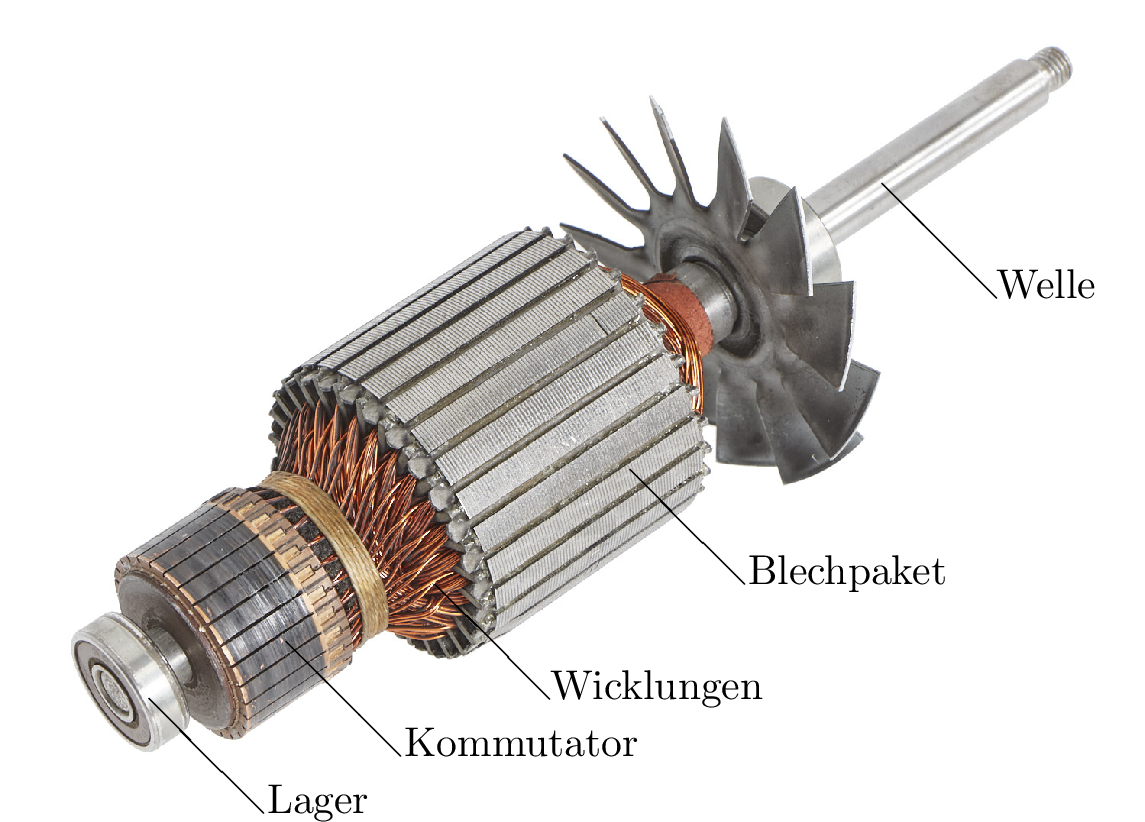
In der Abbildung 4 sind die Komponenten des Rotors gut ersichtlich. Im Allgemeinen wird der Rotor auch Anker oder als Läufer bezeichnet. Die Funktion des Rotors besteht darin, die elektromagnetische Energie durch Rotationen um die eigene Achse in mechanische Energie (und umgekehrt) zu wandeln. Hierzu ist der Rotor an einer Motorwelle befestigt, die die mechanische Energie überträgt. Das Kugellager am Ende der Motorwelle verringert dabei die Reibungsverluste bei der Energieübertragung. Um den Rotor in Bewegung zu bringen, ist das Zusammenwirken von Kommutator und Rotorwicklung wichtig. Die Rotorwicklung, auch Ankerwicklung bezeichnet, hat die Aufgabe ein magnetisches Feld, das Ankerfeld, zu erzeugen. Erst durch die Interaktion des Ankerfelds mit dem Erregerfeld wird ein Drehmoment auf den Rotor ausgeübt und setzt diesen in Bewegung. Die Blechwände, um die die Spulen gewickelt sind, bestehen aus isolierenden Blechen, um Wirbelströme in den Wicklungen zu reduzieren. Der Kommutator oder Stromwender hat die Funktion, die Rotorwicklung getaktet mit Strom zu versorgen. Er besteht aus mehreren voneinander getrennten Lamellen, die jeweils mit einem Strang der Rotorwicklung verbunden sind. Der Strom wird nun über am Stator angebrachten Kohlebürsten an die Kommutatorlamellen geleitet. Durch die Drehung der Lamellen unter den Bürsten wirkt der Kommutator als mechanischer Schalter und sorgt dafür, dass die Stromrichtung in den Rotorwicklungen, die sich jeweils unter den Hauptpolen befinden, gleich bleibt.
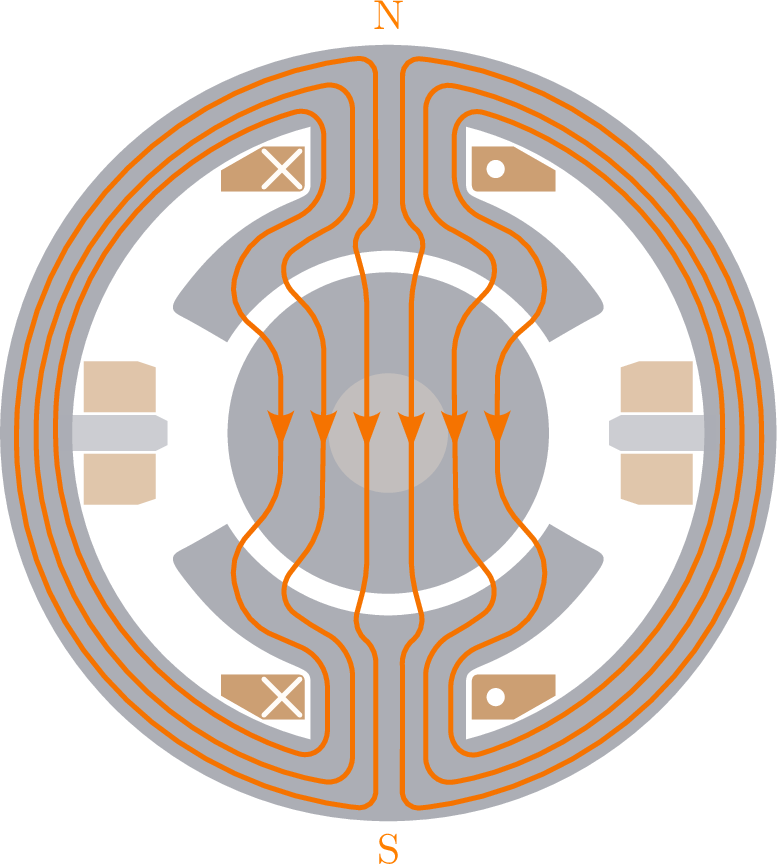
3 Magnetische Felder
Für die Lorentzkraft ist das magnetische Feld entscheidend, in dem sich der Leiter bewegt. Dieses Feld wird durch den Stator mit den Erregerwicklungen erzeugt und ist im Bereich des Rotors näherungsweise parallel und homogen.
4 Berechnung des Drehmoments
In Modul 6 und Kapitel 1 ist bereits die Kraftwirkung auf einen stromdurchflossenen Leiter im Magnetfeld erklärt worden. Um das Drehmoment der Gleichstrommaschine zu berechnen, wird zuerst die induzierte Spannung ermittelt (siehe Modul 6). Dreht sich der Rotor einer erregten Gleichstrommaschine, wird in jeder Leiterschleife des Ankers eine Spannung induziert. Nach dem Induktionsgesetz (Gleichung ??) ist die Höhe der induzierten Spannung (Quellenspannung) \(U_\mathrm {q}\) vom magnetischen Fluss \(\varPhi \) und der zeitlichen Änderung, in diesem Fall der Drehzahl \(n\) bzw. der damit verknüpften Kreisfrequenz \(\omega = 2\pi \cdot n\) abhängig. Werden hierzu noch die spezifischen geometrischen Gegebenheiten des Rotors in Form der Ankerkonstanten \(K\) multipliziert, so ergibt das Produkt aus diesen Kenngrößen die induzierte Spannung \(U_\mathrm {q}\) der Gleichstrommaschine (siehe Gleichung 2).
\begin {equation} {U_\mathrm {q} = K \cdot \varPhi \cdot \omega \label {GlInduzierteSpannungGM}} \end {equation}
Wenn sowohl die elektrischen als auch mechanischen Verluste vernachlässigt werden, kann die induzierte Spannung kann auch direkt über die sogenannte innere Leistung \(P_\mathrm {i}\) angegeben werden. Diese entspricht dann sowohl der elektrischen Leistung \(U_\mathrm {q}\cdot I_\mathrm {A}\), als auch der mechanischen Leistung \(P_\mathrm {mech}\), welche sich aus dem Produkt des inneren Drehmoments \(M_\mathrm {i}\) und der Winkelgeschwindigkeit \(\omega \) errechnet. \begin {equation} {P_\mathrm {i} = U_\mathrm {q}\cdot I_\mathrm {A} = P_\mathrm {mech} = M_\mathrm {i}\cdot \omega \label {GlGMWirkungsgrad}} \end {equation}
Wird diese Erkenntnis nun in Gleichung 2 eingesetzt, errechnet sich das innere Drehmoment \(M_\mathrm {i}\) aus dem Produkt der Ankerkonstante \(K\), dem magnetischen Fluss \(\varPhi \) und dem Ankerstrom \(I_\mathrm {A}\) \begin {equation} M_\mathrm {i} = K \cdot \varPhi \cdot I_\mathrm {A} \label {GlMomentGM} \end {equation} Im Motorbetrieb ist das Drehmoment an der Welle der Maschine das innere Drehmoment \(M_\mathrm {i}\) abzüglich der Verluste \(M_\mathrm {V}\). Das Maschinenmoment kann auch durch den Wirkungsgrad \(\eta _1\) ausgedrückt werden. Dieser Wirkungsgrad vernachlässigt allerdings die elektrischen Verluste durch den Ankerwiderstand und der Erregung. \begin {equation} M = M_\mathrm {i} - M_\mathrm {V}\qquad \qquad M = \eta _1\cdot M_\mathrm {i}\label {GLMomentWirkungsgradGM} \end {equation}
- Verlustmoment: \(M_\mathrm {V}\) [Nm]
- Wirkungsgrad: \(\eta \) [1]
5 Fremderregte Gleichstrommaschine
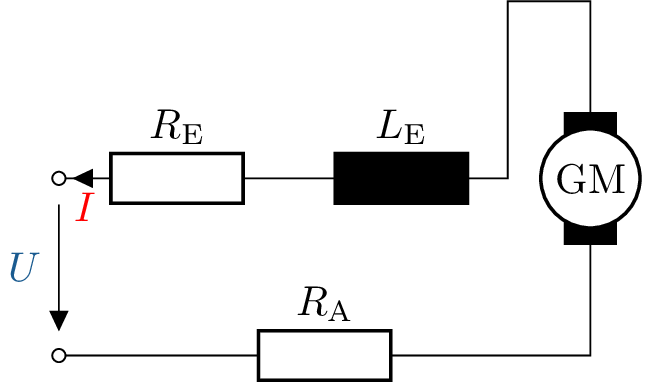
Der Erregerkreis im Stator der Gleichstrommaschine und der Rotorkreis, der über den Kommutator mit Strom versorgt wird, sind prinzipiell unabhängig voneinander. Wenn beide Stromkreise von unterschiedlichen Spannungsquellen versorgt werden, wird die Maschine fremderregt genannt. Das Ersatzschaltbild ist in Abbildung 6 dargestellt.
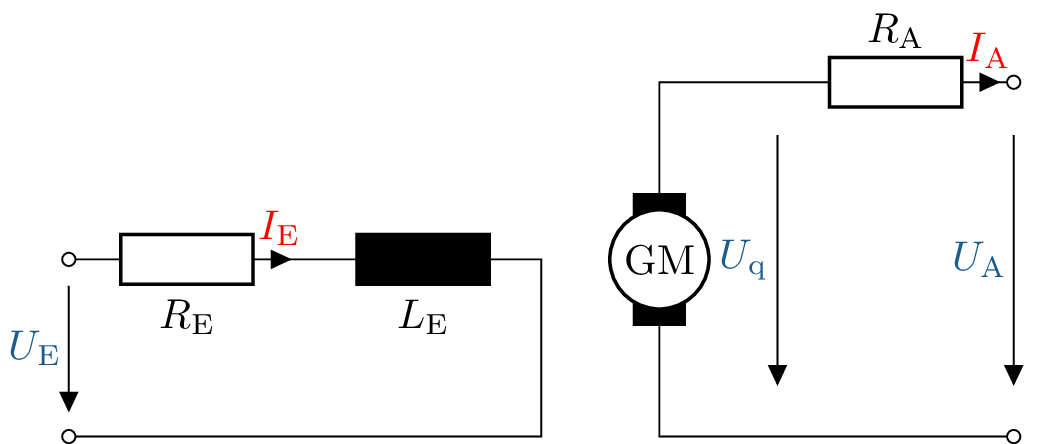
Der Erregerkreis besteht aus der Induktivität der Erregerwicklung \(L_\mathrm {E}\) und dem Kupferwiderstand \(R_\mathrm {E}\) der Spule. Im Ankerkreis wird die Wicklung als Kreis mit angedeuteten Schleifringen dargestellt, da sie einerseits eine Induktivität, als auch eine Spannungsquelle darstellt. Auch der Anker hat einen ohmschen Widerstand \(R_\mathrm {A}\).
Der Maschenumlauf im Rotorkreis ergibt: \begin {equation} U_\mathrm {A} = U_\mathrm {q} + I_\mathrm {A}\cdot R_\mathrm {A} \end {equation}
Durch Einsetzen von Gleichung 2 und 4 ergibt sich die Drehzahl/Drehmoment- und Ankerstromkennlinie für die fremderregte Gleichstrommaschine: \begin {equation} n = \frac {U_\mathrm {A}}{2\pi K\cdot \varPhi } - \frac {R_\mathrm {A}\cdot M_\mathrm {i}}{2\pi (K\cdot \varPhi )^2}\label {GlfremderregteGM1} \end {equation}
Beispiel 2: Fremderregte Gleichstrommaschine
Eine fremderregte Gleichstrommaschine mit der Ankerkonstante \(K=\frac {1}{2\pi }\) hat bei der Spannung \(U_\mathrm {A}=400\,\text {V}\) eine Leerlaufdrehzahl von \(n=1200\,\frac {1}{\text {min}}\). Der Ankerwiderstand beträgt \(R_\mathrm {A}=2,3\,\Omega \).
-
Wie groß ist der Erregerfluss \(\varPhi \)?
Im Leerlauf ist das innere Drehmoment \(M_\mathrm {i}\) gleich Null. Gleichung 7 vereinfacht sich daher zu: \begin {align*} n & =\frac {U_\mathrm {A}}{2\pi K\cdot \varPhi } \\ \varPhi & =\frac {U_\mathrm {A}}{2\pi K\cdot n} = \frac {400\,\text {V}}{\frac {2\pi }{2\pi }\cdot 1200 \,\frac {1}{\text {min}}\cdot \frac {1}{60\,\frac {\text {s}}{\text {min}}}} = 20\,\text {Vs} \end {align*}
- Wie schnell dreht die Maschine bei einem inneren Drehmoment von \(M_\mathrm {i}=10\,\text {Nm}\)? \begin {align*} n & = \frac {U_\mathrm {A}}{2\pi K\cdot \varPhi } - \frac {R_\mathrm {A}\cdot M_\mathrm {i}}{2\pi (K\cdot \varPhi )^2} \\ & = \frac {400\,\text {V}}{\frac {2\pi }{2\pi }\cdot 20\,\text {Vs}} - \frac {2,3\,\Omega \cdot 10\,\text {Nm}}{2\pi (\frac {1}{2\pi }\cdot 20\,\text {Vs})^2} \\ & = 20\,\frac {1}{\text {s}} - 0,362 \,\frac {1}{\text {s}} = 19,638\,\frac {1}{\text {s}} = 1178,3\,\frac {1}{\text {min}} \end {align*}
- Wie groß ist der Ankerstrom? \begin {align*} I_\mathrm {A} & = \frac {M_\mathrm {i}}{K\cdot \varPhi } = \frac {10\,\text {Nm}}{\,\frac {1}{2\pi }\cdot 20\,\text {Vs}\,} = 3,61\,\text {A} \end {align*}
6 Reihenschlussmaschine
Bei der Reihenschlussmaschine sind Erreger- und Rotorkreis in Reihe miteinander verbunden. Der Erregerstrom ist daher gleich dem Ankerstrom. Diese Art von Motor wird häufig in einfachen Elektrogeräten an Wechselspannung eingesetzt und wird daher auch Universalmotor genannt. Als Gleichstrommaschine wurde sie früher vor allem in Traktionsantrieben zum Beispiel von Straßenbahnen eingesetzt. Heutzutage sind diese allerdings wegen des besseren Wirkungsgrades durch Drehstromantriebe mit Umrichter ersetzt.
- Auch für Wechselspannung einsetzbar
- hohes Anzugsmoment
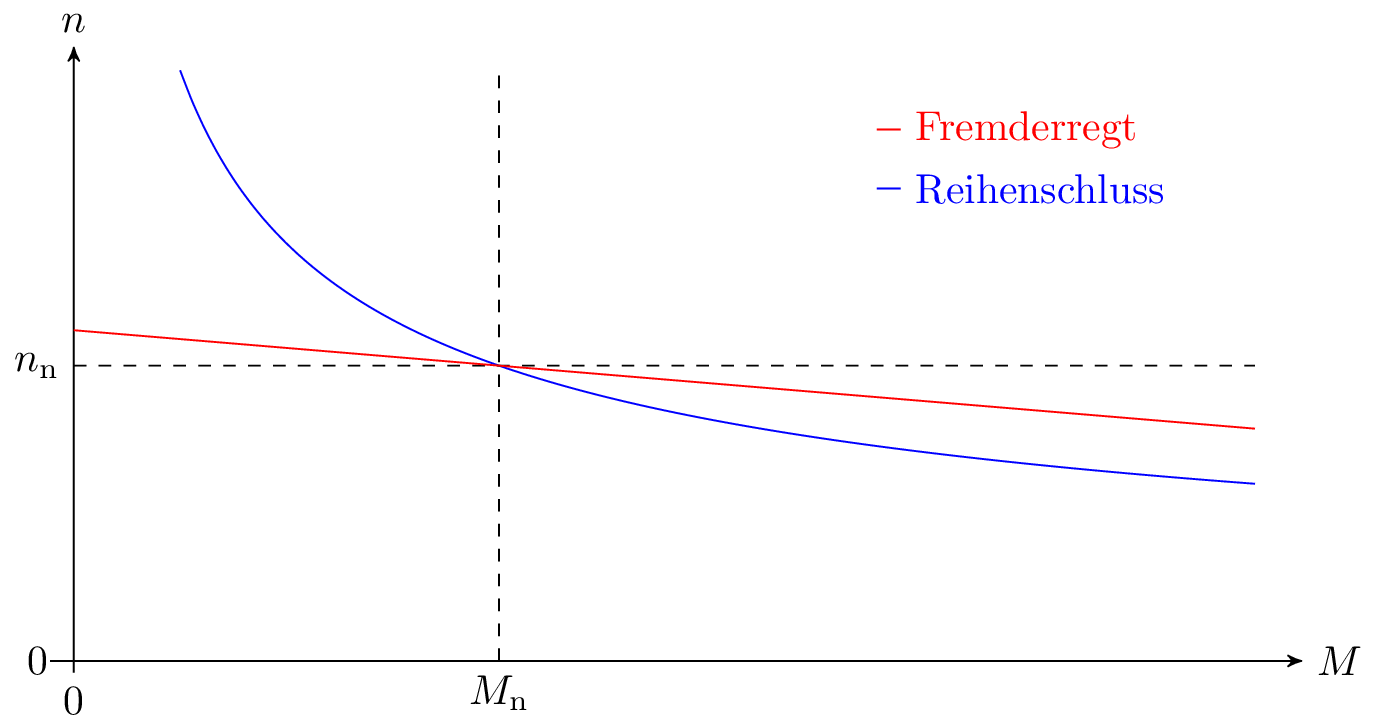
Im Gegensatz zur fremderregten Gleichstrommaschine, deren Drehzahl-Drehmomentenkennlinie nach Gleichung 7 eine Gerade ist, verhält sich die Reihenschlussmaschine nichtlinear. Ohne Belastung ist die Drehzahl theoretisch unendlich, die Maschine wird also so stark beschleunigen, bis sie sich selbst durch die Fliehkraft zerstört. Die Maschine „geht durch“. Bei den Anwendungen als Traktionsantrieb kommt ein Leerlauf aber nie vor, das große Anlaufmoment ist hingegen gewünscht.

Weitere Materialien
Videos
