Im Modul
Grundlagen Komplexe Zahlen
Mehrphasensysteme - Mitsystem, Gegensystem und Nullsystem
Scheinleistung, Wirkleistung und Blindleistung

Im Kapitel Drehstrom wurde erläutert, wie sich die Spannungen, die Ströme und die Leistungen in verschiedenen dreiphäsigen Systemen zusammensetzen. In dem besonderen Fall von symmetrischen Verbrauchern konnte gezeigt werden, dass relativ einfach eine Netzberechnung druchgeführt werden kann. Vor allem die vereinfachte Darstellung durch die einphasigen Ersatzschaltbilder hilft bei der Berechnung. Durch unsymmetrische Verbraucher können diese Vereinfachungen nicht angenommen werden und führen dazu, dass umfassendere Netzberechnungen auch schon bei kleinen Netzen unübersichtlich und aufwändig werden. Unsymmetrien treten z.B. durch Netzfehler wie ein einpoliger Kurzschluss, durch Schalthandlungen, oder unsymmetrische Belastung der einzelnen Phasen auf. Die Zusammenhänge von auslösenden Ereignissen und den Ergebnissen sind allein anhand von Zahlenwerten schwer nachvollziehbar. Um auch umfassende und unsymmetrische Netze berechnen zu können, kann mit einer Transformation des bekannten Systems in drei neue Systeme abhilfe geschaffen werden. Dafür werden die drei folgenden Systeme näher betrachtet:
Lernziele: Mehrphasensysteme
Die Studierenden
Grundlegend ist das Ziel der Transformation, ein unsymmetrisches System von n Zeigern in n Systeme mit symmetrischer Zeigeranordnung zu überführen. Für ein Drehstromsystem bedeutet das, dass drei Systeme geschaffen werden sollen. Jeder Leiter, also \(L_1\), \(L_2\) und \(L_3\) soll ersetzt werden durch ein System was eine symmetrische Zeigeranordnung hat. Grundlage der Transformationsvorschrift ist der bereits bekannte Drehoperator \(\underline {a}\) und \(\underline {a}^2\) (vgl. Gleichung ??). Für den Strom in den jeweiligen Leitern lassen sich so die Symmetriebedingungen aufstellen (Hier ist anzumerken, dass alles was für den Strom gilt an Zusammenhängen auch für die Spannung gilt!):
\begin {align} \underline {I}_{\mathrm {L1}}&=\underline {I}_{0}+\underline {I}_{1}+\underline {I}_{2} \nonumber \\ \underline {I}_{\mathrm {L2}}&=\underline {I}_{0}+\underline {a}^2\cdot \underline {I}_{1}+\underline {a}\cdot \underline {I}_{2} \label {ZerlegungL2} \\ \underline {I}_{\mathrm {L3}}&=\underline {I}_{0}+\underline {a}\cdot \underline {I}_{1}+\underline {a}^2\cdot \underline {I}_{2} \nonumber \end {align}
Die Indizes den rechten Seiten der Gleichungen stehen für die drei Systeme: Mitsystem (1), Gegensystem (2) und Nullsystem (0). Schaut man sich die Werte des Mitsystems an, dann ergeben sich durch die Drehoperatoren rechtsdrehende Phasenströme. Bei dem Gegensystem sind die transformierten Phasenströme linksdrehend angeordnet und bei dem Nullsystem sind alle Komponenten gleichgerichtet. Grundsätzlich tritt das Nullsystem nur dann auf, wenn die Summe aller Ströme des Ausgangssystems ungleich Null sind.
Im nächsten Schritt werden die sogenannten Zerlegungsgleichungen (Gleichungen ??) so umgestellt, dass das Verhältnisse vom Strom des Mit- Gegen- Nullsystemes zu den Leiterströmen des Ursprungssytem aufzeigt wird.
Für den Strom im Nullsystem gilt durch Addition:
\begin {align} \underline {I}_{\mathrm {L1}}+\underline {I}_{\mathrm {L2}}+\underline {I}_{\mathrm {L3}}&=3\cdot \underline {I}_0+\underline {I}_1\cdot (1+\underline {a}^2+\underline {a})+\underline {I}_2\cdot (1+\underline {a}+\underline {a}^2) \notag \\ &=3\cdot \underline {I}_0 \\ \Leftrightarrow \underline {I}_0&=\frac {1}{3}\cdot (\underline {I}_{\mathrm {L1}}+\underline {I}_{\mathrm {L2}}+\underline {I}_{\mathrm {L3}}) \end {align}
Für die Ermittlung des Stroms des Mitsystems werden zuerst die Gleichungen so multipliziert, dass die Vorfaktoren vor dem Mitstrom 1 ergeben. Danach werden die Zerlegungsgleichungen wieder addiert.
\(\underline {a}^3=1\) ; \(\underline {a}^4=\underline {a}\) ; \(\underline {a}^5=\underline {a}^2\) ; ...
\begin {align} \underline {I}_{\mathrm {L1}}&=\underline {I}_{0}+\underline {I}_{1}+\underline {I}_{2} \\ \underline {a}\cdot \underline {I}_{\mathrm {L2}}&=\underline {a}\cdot \underline {I}_{0}+\underline {a}^3\cdot \underline {I}_{1}+\underline {a}^2\cdot \underline {I}_{2} \\ \underline {a}^2\cdot \underline {I}_{\mathrm {L3}}&=\underline {a}^2\cdot \underline {I}_{0}+\underline {a}^3\cdot \underline {I}_{1}+\underline {a}\cdot \underline {I}_{2} \end {align}
\begin {align} \underline {I}_{\mathrm {L1}}+\underline {a}\cdot \underline {I}_{\mathrm {L2}}+\underline {a}^2\cdot \underline {I}_{\mathrm {L3}}&=\underline {I}_{0}\cdot (1+\underline {a}+\underline {a}^2)+3\cdot \underline {I}_{1}+\underline {I}_{2}\cdot (1+\underline {a}^2+\underline {a}) \\ &=3\cdot \underline {I}_{1} \notag \\ \Leftrightarrow \underline {I}_{1}&=\frac {1}{3}\cdot (\underline {I}_{\mathrm {L1}}+\underline {a}\cdot \underline {I}_{\mathrm {L2}}+\underline {a}^2\cdot \underline {I}_{\mathrm {L3}}) \notag \end {align}
Zum Schluss wird noch der Strom für das Gegensystem berechnet. Dabei wird das gleiche Prinzip angewendet, wie beim Mitsystem: Erst wird der Vorfaktor angepasst, dann alle Zerlegungsgleichungen addiert:
\begin {align} \underline {I}_{\mathrm {\mathrm {L1}}}&=\underline {I}_{0}+\underline {I}_{1}+\underline {I}_{2} \\ \underline {a}^2\cdot \underline {I}_{\mathrm {\mathrm {L2}}}&=\underline {a}^2\cdot \underline {I}_{0}+\underline {a}^4\cdot \underline {I}_{1}+\underline {a}^3\cdot \underline {I}_{2} \\ \underline {a}\cdot \underline {I}_{\mathrm {\mathrm {L3}}}&=\underline {a}\cdot \underline {I}_{0}+\underline {a}^2\cdot \underline {I}_{1}+\underline {a}^3\cdot \underline {I}_{2} \end {align}
\begin {align} \underline {I}_{\mathrm {L1}}+\underline {a}^2\cdot \underline {I}_{\mathrm {L2}}+\underline {a}\cdot \underline {I}_{\mathrm {L3}}&=(1+\underline {a}^2+\underline {a})\underline {I}_{0}+(1+\underline {a}+\underline {a}^2)\cdot \underline {I}_{1}+3\cdot \underline {I}_{2} \\ &=3\cdot \underline {I}_{2} \notag \\ \Leftrightarrow \underline {I}_{2}&=\frac {1}{3}\cdot (\underline {I}_{\mathrm {L1}}+\underline {a}^2\cdot \underline {I}_{\mathrm {L2}}+\underline {a}\cdot \underline {I}_{\mathrm {L3}}) \notag \end {align}
So ergeben sich für die Ströme aller System folgende Gleichungen:
\begin {align} \underline {I}_0&=\frac {1}{3}\cdot (\underline {I}_{\mathrm {L1}}+\underline {I}_{\mathrm {L2}}+\underline {I}_{\mathrm {L3}}) \\ \underline {I}_{1}&=\frac {1}{3}\cdot (\underline {I}_{\mathrm {L1}}+\rlap {\underline {a}}\phantom {a^2}\cdot \underline {I}_{\mathrm {L2}}+\underline {a}^2\cdot \underline {I}_{\mathrm {L3}}) \\ \underline {I}_{2}&=\frac {1}{3}\cdot (\underline {I}_{\mathrm {L1}}+\underline {a}^2\cdot \underline {I}_{\mathrm {L2}}+\rlap {\underline {a}}\phantom {a^2}\cdot \underline {I}_{\mathrm {L3}}) \end {align}
Schaut man sich diese drei Gleichungen genau an, sieht man, dass der Leiter L1 in keiner der drei Gleichungen einen Drehoperator als Vorfaktor hat. Deshalb soll der L1 Leiter als Bezugsleiter gewählt werden. Das bedeutet, dass das der Leiter ist, durch den eine Unsymmetrie im Originalsystem auftritt (z.B. durch einen einpoligen Erdkurzschluss). Die vorhanden Restsymmetrien im Originalsystem können dann einfacher über die anderen Leiter betrachtet werden Es kann natürlich jeder Leiter als Bezugsleiter genommen werden, da grundsätzlich jeder Leiter einem Index (L1, L2, L3) frei zugeordnet werden kann. So kann jedoch die anfänglich festgelegte Vorderung erfüllt werden: Die Symmetrien der realen Netze und Betriebsmittel müssen vorteilhaft genutzt werden!
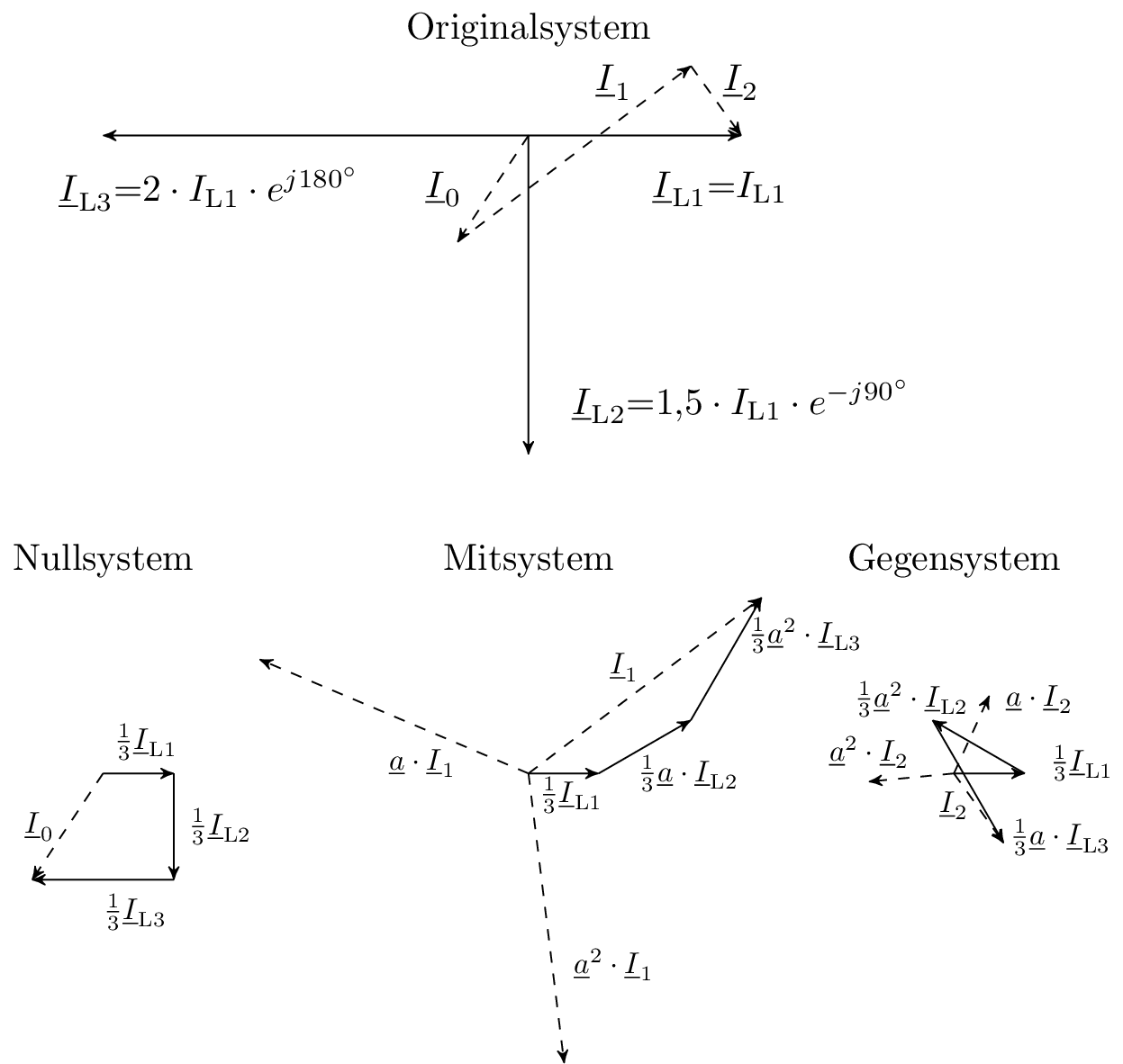
Beispielhaft kann ein unsymmetrischer Strom im Dreiphasensytem und die Transformation folgendermaßen aussehen:
Abb. 1 zeigt das Zeigerdiagramm einer unsymmetrischen Belastung. Im Originalsystem ist an den Zeigern zu erkennen, dass sowohl die Winkel, wie auch die Amplituden vom symmetrischen Zustand abweichen. Durch die Transformation in die drei Systeme erhält man wiederum symmetrische Zeiger, mit denen dann einfacher gerechnet werden kann. An den Drehoperatoren und dem Vorfaktor von \(\frac {1}{3}\) ist mit den Zeigern gut zu erkennen, wie sich die transformierten Ströme verhalten.
Um die Transformationsgleichungen nicht immer vollständig hinschreiben zu müssen, können die Gleichungen auch in Matrixschreibweise geschrieben werden:
\begin {align} \begin {bmatrix} \underline {I}_0 \\ \underline {I}_1 \\ \underline {I}_2 \end {bmatrix} = \frac {1}{3} \cdot \begin {bmatrix} 1 & 1 & 1 \\ 1 & \underline {a} & \underline {a}^2 \\ 1 & \underline {a}^2 & \underline {a} \end {bmatrix} \cdot \begin {bmatrix} \underline {I}_{\mathrm {L1}} \\ \underline {I}_{\mathrm {L2}} \\ \underline {I}_{\mathrm {L3}} \end {bmatrix} \label {TraFoMatrix} \end {align}
Die Schreibweise kann noch weiter vereinfacht werden, wenn der Term mit den Drehoperatoren und der Term mit Vorfaktor in einer Matrix zusammengfasst wird. Diese Matrix wird auch Symmetrierungsmatrix genannt:
\begin {align} \begin {bmatrix} \underline {T} \end {bmatrix} =\frac {1}{3} \cdot \begin {bmatrix} 1 & 1 & 1 \\ 1 & \underline {a} & \underline {a}^2 \\ 1 & \underline {a}^2 & \underline {a} \end {bmatrix} \end {align}
In der Kompaktschreibweise erhält man so folgende Form:
\begin {align} \begin {bmatrix} \underline {I}_{012} \end {bmatrix} = \begin {bmatrix} \underline {T} \end {bmatrix} \cdot \begin {bmatrix} \underline {I}_{\mathrm {L1L2L3}} \end {bmatrix} \end {align}
Gemäß den Rechenregeln für Matrizen kann mit der Inversen von \(\begin {bmatrix}\underline {T}\end {bmatrix}\) die Rücktransformation erfolgen:
\begin {align} \begin {bmatrix} \underline {I}_{\mathrm {L1}} \\ \underline {I}_{\mathrm {L2}} \\ \underline {I}_{\mathrm {L3}} \end {bmatrix} = \frac {1}{3} \cdot \begin {bmatrix} 1 & 1 & 1 \\ 1 & \underline {a}^2 & \underline {a} \\ 1 & \underline {a} & \underline {a}^2 \end {bmatrix} \cdot \begin {bmatrix} \underline {I}_0 \\ \underline {I}_1\\ \underline {I}_2 \end {bmatrix} \end {align}
\begin {align} \begin {bmatrix} \underline {I}_{\mathrm {L1L2L3}} \end {bmatrix} = \begin {bmatrix} \underline {T} \end {bmatrix}^{-1} \cdot \begin {bmatrix} \underline {I}_{012} \end {bmatrix} \end {align}
Merke: Mit-, Gegen- und Nullsystem
Ein System wird zur Analyse in die drei Systeme: Mitsystem, Gegensystem und Nullsystem
transformiert.
Das Mitsystem wird mit dem Index 1 versehen: \(\underline {I}_1\)
Das Gegensystemsystem wird mit dem Index 2 versehen: \(\underline {I}_2\)
Das Nullsystem wird mit dem Index 0 versehen: \(\underline {I}_0\)
Wie die Leistung berechnet wird, wurde bereits im Kapitel Drehstrom erläutert. Auch hier kann die Gleichung zur Leistungsberechnung zur Vereinfachung in Matrizenschreibweise ausgedrückt werden: \begin {align} \underline {S}_{\mathrm {L1L2L3}}&=\underline {U}_{\mathrm {L1}}\cdot \underline {I}_{\mathrm {L1}}^*+\underline {U}_{\mathrm {L2}}\cdot \underline {I}_{\mathrm {L2}}^*+\underline {U}_{\mathrm {L3}}\cdot \underline {I}_{\mathrm {L3}}^* \\ &= \begin {bmatrix} \underline {U}_{\mathrm {L1}} & \underline {U}_{\mathrm {L2}} & \underline {U}_{\mathrm {L3}} \end {bmatrix} \cdot \begin {bmatrix} \underline {I}_{\mathrm {L1}}^* \\ \underline {I}_{\mathrm {L2}}^* \\ \underline {I}_{\mathrm {L3}}^* \end {bmatrix} = \begin {bmatrix} \underline {U}_{\mathrm {L1L2L3}} \end {bmatrix} \cdot \begin {bmatrix} \underline {I}_{\mathrm {L1L2L3}} \end {bmatrix}_t ^* \notag \end {align}
Mit den gegebenen Drehoperatoren können die Ströme und Spannungen in einem symmetrische System auf jeweils eine Phase bezogen werden (\(\underline {U}_{\mathrm {L2}}=\underline {a}^2\cdot \underline {U}_{\mathrm {L1}}, \underline {U}_{\mathrm {L3}}=\underline {a}\cdot \underline {U}_{\mathrm {L1}}\))
Daraus ergibt sich für die Leistung die bekannte Vereinfachung: \begin {align} \underline {S}_{\mathrm {L1L2L3}}&=\underline {U}_{\mathrm {L1}}\cdot \underline {I}_{\mathrm {L1}}^*+\underline {U}_{\mathrm {L1}}\cdot \underline {I}_{\mathrm {L1}}^*+\underline {U}_{\mathrm {L1}}\cdot \underline {I}_{\mathrm {L1}}^* \\ &=3\cdot \underline {U}_{\mathrm {L1}}\cdot \underline {I}_{\mathrm {L1}}^* \end {align}
Nun kann mit der Matrixschreibweise die Transformation in die neuen Systeme berechnet werden: \begin {align} \begin {bmatrix} \underline {U}_{\mathrm {L1L2L3}} \end {bmatrix} &= ( \begin {bmatrix} \underline {T} \end {bmatrix}^{-1} \cdot \begin {bmatrix} \underline {U}_{012} \end {bmatrix} ) = \begin {bmatrix} \underline {U}_{012} \end {bmatrix} \cdot \begin {bmatrix} \underline {T} \end {bmatrix}^{-1} \\ \begin {bmatrix} \underline {I}_{\mathrm {L1L2L3}} \end {bmatrix}^* &= ( \begin {bmatrix} \underline {T} \end {bmatrix}^{-1} \cdot \begin {bmatrix} \underline {I}_{012} \end {bmatrix} )^* = \begin {bmatrix} \underline {T} \end {bmatrix}^{-1*} \cdot \begin {bmatrix} \underline {I}_{012} \end {bmatrix}^* \\ \underline {S}_{\mathrm {L1L2L3}} &= \begin {bmatrix} \underline {U}_{012} \end {bmatrix}_t \cdot \begin {bmatrix} \underline {T} \end {bmatrix}^{-1} \cdot \begin {bmatrix} \underline {T} \end {bmatrix}^{-1*} \cdot \begin {bmatrix} \underline {I}_{012} \end {bmatrix}^* \\ &= \begin {bmatrix} \underline {U}_{012} \end {bmatrix}_t \cdot \begin {bmatrix} 1 & 1 & 1 & \\ 1 & \underline {a}^2 & \underline {a} \\ 1 & \underline {a} & \underline {a}^2 \end {bmatrix} \cdot \begin {bmatrix} 1 & 1 & 1 & \\ 1 & \underline {a}^2 & \underline {a} \\ 1 & \underline {a} & \underline {a}^2 \end {bmatrix}^* \cdot \begin {bmatrix} \underline {I}_{012} \end {bmatrix}^* \notag \\ &= \begin {bmatrix} \underline {U}_{012} \end {bmatrix}_t \cdot \begin {bmatrix} 1 & 1 & 1 & \\ 1 & \underline {a}^2 & \underline {a} \\ 1 & \underline {a} & \underline {a}^2 \end {bmatrix} \cdot \begin {bmatrix} 1 & 1 & 1 & \\ 1 & \underline {a} & \underline {a}^2 \\ 1 & \underline {a}^2 & \underline {a} \end {bmatrix} \cdot \begin {bmatrix} \underline {I}_{012} \end {bmatrix}^* \notag \\ &= \begin {bmatrix} \underline {U}_{012} \end {bmatrix} \cdot \begin {bmatrix} 3 & 0 & 0 \\ 0 & 3 & 0 \\ 0 & 0 & 3 \end {bmatrix} \cdot \begin {bmatrix} \underline {I}_{012} \end {bmatrix}^* \notag \\ &=3\cdot (\underline {U}_0\cdot \underline {I}_o^*+\underline {U}_1\cdot \underline {I}_1^*+\underline {U}_2\cdot \underline {I}_2^*)=3\cdot \underline {S}_{012} \notag \end {align}
ESB dienen grundlegend immmer der einfacheren Betrachtung und einem erleichterten Verständniss der Komponenten. Es sollen sich nun verschiedene Betriebsmittel angeschaut werden und wie sich die Transformationen in verschiedenen Netzsituationen verhalten.
Symmetrische Spannungsquellen findet man z.B. bei der Netzeinspeisung und auch bei Synchronmaschienen. Im ersten Schritt wird sich das Ausgangssystems angeschaut. Die Zusammenhänge zwischen der Sternspannung und den einzelnen Phasen ist bereits aus dem Kapitel ??? bekannt. Mit der Formel für die Transformation (vgl. ??) lässt sich nun rechnerisch zeigen, dass in einem solchen symmetrischen Fall die Spannungen des Gegen- und Nullsystems 0 ergeben.
Lediglich im Mitsystem tritt eine treibende Spannung, in Höhe der Sternspannung auf: \begin {align} \begin {bmatrix} \underline {U}_0 \\ \underline {U}_1 \\ \underline {U}_2 \end {bmatrix} &= \frac {1}{3}\cdot \begin {bmatrix} 1 & 1 & 1 & \\ 1 & \underline {a} & \underline {a}^2 \\ 1 & \underline {a}^2 & \underline {a} \end {bmatrix} \cdot \begin {bmatrix} \underline {U}_{\mathrm {L1}} \\ \underline {U}_{\mathrm {L2}} \\ \underline {U}_{\mathrm {L3}} \end {bmatrix} \\ \begin {bmatrix} \underline {U}_{012} \end {bmatrix} &= \begin {bmatrix} \underline {T} \end {bmatrix} \cdot \begin {bmatrix} \underline {U}_{\Stern } \\ \underline {a}^2\cdot \underline {U}_{\Stern } \\ \underline {a}\cdot \underline {U}_{\Stern } \end {bmatrix} \end {align}
Löst man die Gleichungen für die transformierten Systeme auf erhält man die Spannungsergebnisse: \begin {align} \underline {U}_0&=\frac {1}{3}\cdot {U}_{\Stern }\cdot (1+\underline {a}^2+\underline {a})=0 \\ \underline {U}_1&=\frac {1}{3}\cdot {U}_{\Stern }\cdot (1+\underline {a}\cdot \underline {a}^2+\underline {a}^2\cdot \underline {a})=U_{\Stern } \\ \underline {U}_2&=\frac {1}{3}\cdot {U}_{\Stern }\cdot (1+\underline {a}^2\cdot \underline {a}^2+\underline {a}\cdot \underline {a})=0 \end {align}
Mit den Ergebnissen des Gegen- und Nullsystems kann bildlich gesagt werden, dass diese kurzgeschlossen sind. So können für die drei transformierten Systeme die jeweiligen ESB erstellt werden:
In der Abbildung 2 soll nochmal deutlich hervorgehoben werden, dass einerseits drei einzelne System gebildet werden und weiter, dass in dem spezial Fall der symmetrischen Quellen nur in einem der Systeme eine Spannung auftaucht.
Für die Betrachtung der Lasten soll eine Sternschaltung mit Rückleiter gewählt werden. Es wird in jedem Leiter, auch im Rückleiter, eine Impedanz Z angenommen. Für den symmetrischen Fall werden die Impedanzen als gleich groß angenommen, lediglich die Impedanz im Rückleiter kann von den anderen abweichen und bekommt einen eigenen Index.
Für das Originalsystem werden die Gleichung für die Spannung folgendermaßen aufgestellt:
\begin {align} \underline {U}_{\mathrm {L1}}=\underline {Z}\cdot \underline {I}_{\mathrm {L1}}+\underline {Z}_\mathrm {E}\cdot (\underline {I}_{\mathrm {L1}}+\underline {I}_{\mathrm {L2}}+\underline {I}_{\mathrm {L3}}) \\ \underline {U}_{\mathrm {L2}}=\underline {Z}\cdot \underline {I}_{\mathrm {L2}}+\underline {Z}_\mathrm {E}\cdot (\underline {I}_{\mathrm {L1}}+\underline {I}_{\mathrm {L2}}+\underline {I}_{\mathrm {L3}}) \\ \underline {U}_{\mathrm {L3}}=\underline {Z}\cdot \underline {I}_{\mathrm {L3}}+\underline {Z}_\mathrm {E}\cdot (\underline {I}_{\mathrm {L1}}+\underline {I}_{\mathrm {L2}}+\underline {I}_{\mathrm {L3}}) \end {align}
Auch hier kann mittels Matrixschreibweise vereinfacht werden: \begin {align} \begin {bmatrix} \underline {U}_{\mathrm {L1}} \\ \underline {U}_{\mathrm {L2}} \\ \underline {U}_{\mathrm {L3}} \end {bmatrix} = \begin {bmatrix} \underline {Z}+\underline {Z}_\mathrm {E} & \underline {Z}_\mathrm {E} & \underline {Z}_\mathrm {E} \\ \underline {Z}_\mathrm {E} & \underline {Z}+\underline {Z}_\mathrm {E} & \underline {Z}_\mathrm {E} \\ \underline {Z}_\mathrm {E} & \underline {Z}_\mathrm {E} & \underline {Z}+\underline {Z}_\mathrm {E} \end {bmatrix} \cdot \begin {bmatrix} \underline {I}_{\mathrm {L1}} \\ \underline {I}_{\mathrm {L2}} \\ \underline {I}_{\mathrm {L3}} \end {bmatrix} \end {align}
Mit...
\begin {align} \begin {bmatrix} \underline {Z}_{\mathrm {L1L2L3}} \end {bmatrix} = \begin {bmatrix} \underline {Z}+\underline {Z}_\mathrm {E} & \underline {Z}_\mathrm {E} & \underline {Z}_\mathrm {E} \\ \underline {Z}_\mathrm {E} & \underline {Z}+\underline {Z}_\mathrm {E} & \underline {Z}_\mathrm {E} \\ \underline {Z}_\mathrm {E} & \underline {Z}_\mathrm {E} & \underline {Z}+\underline {Z}_\mathrm {E} \end {bmatrix} \end {align}
...ergibt sich
\begin {align} \begin {bmatrix} \underline {U}_{\mathrm {L1L2L3}} \end {bmatrix} = \begin {bmatrix} \underline {Z}_{\mathrm {L1L2L3}} \end {bmatrix} \cdot \begin {bmatrix} \underline {I}_{\mathrm {L1L2L3}} \end {bmatrix} \end {align}
Wird mit den Transformationsgleichungen umgeformt folgt: \begin {align} \begin {bmatrix} \underline {T} \end {bmatrix}^{-1} \cdot \begin {bmatrix} \underline {U}_{012} \end {bmatrix} = \begin {bmatrix} \underline {Z}_{\mathrm {L1L2L3}} \end {bmatrix} \begin {bmatrix} \underline {T} \end {bmatrix}^{-1} \cdot \begin {bmatrix} \underline {I}_{012} \end {bmatrix} \end {align}
Bei den symmetrischen Spannungsquellen konnte aus der Transformation die Spannung abhängig vom Originalsystem errechnet werden. Das gleiche soll auf für die Impedanzen für die Verbraucher geschafft werden. Dafür müssen die aufgestellten Gleichunge noch so umgeformt werden, dass sich ein Verhältnis von transformierten Impedanzen und Impedanzen des Originalsystem ergibt. Um das zu erreichen werden beide Seiten erst mit \(\begin {bmatrix}\underline {T}\end {bmatrix}\) erweitert und dann auf Grundlage des Ohmschen-Gesetzes umgestellt. \begin {align} \begin {bmatrix} \underline {T} \end {bmatrix} \cdot \begin {bmatrix} \underline {T} \end {bmatrix}^{-1} \cdot \begin {bmatrix} \underline {U}_{012} \end {bmatrix} &= \begin {bmatrix} \underline {T} \end {bmatrix} \cdot \begin {bmatrix} \underline {Z}_{\mathrm {L1L2L3}} \end {bmatrix} \begin {bmatrix} \underline {T} \end {bmatrix}^{-1} \cdot \begin {bmatrix} \underline {I}_{012} \end {bmatrix} \\ \begin {bmatrix} \underline {U}_{012} \end {bmatrix} &= \begin {bmatrix} \underline {T} \end {bmatrix} \cdot \begin {bmatrix} \underline {Z}_{\mathrm {L1L2L3}} \end {bmatrix} \begin {bmatrix} \underline {T} \end {bmatrix}^{-1} \cdot \begin {bmatrix} \underline {I}_{012} \end {bmatrix} \\ \begin {bmatrix} \underline {Z}_{012} \end {bmatrix} &= \begin {bmatrix} \underline {T} \end {bmatrix} \cdot \begin {bmatrix} \underline {Z}_{\mathrm {L1L2L3}} \end {bmatrix} \begin {bmatrix} \underline {T} \end {bmatrix}^{-1} \end {align}
Wird die Matrixoperation der letzten Gleichung durchgeführt, dann ergibt sich der gewünschte Zusammenhanhg von Original- und Transformationssystem. \begin {align} \begin {bmatrix} \underline {Z}_{012} \end {bmatrix} = \begin {bmatrix} \underline {Z}+3\underline {Z}_E & 0 & 0 \\ 0 & \underline {Z} & 0 \\ 0 & 0 & \underline {Z} \end {bmatrix} \end {align}
Nun können auch für die symmetrischen Lasten die jeweiligen ESB der transformierten Systeme aufgestellt werden:
In Abb. 3 treten im Mit- und Gegensystem die gleichen Impedanzen auf. Sollten die Verbraucher im Dreieck verschaltet sein, müssten die Impedanzen mit den bekannten Verhältnissen in Sterngrößen umgerechnet werden. Für die Nullimpedanzen gilt, dass Ströme nur fließen, wenn auch in der Realität eine Verbindung zu einem Stern besteht. Dann treten die Impedanzen im Rückleiter mit dreifachem Wert auf.
Die Leitung ist die Verbindung zwischen der Spannungsquelle und den Verbrauchern. Bisher wurden in den Betrachtungen zum Drehstrom nur unterschieden zwischen Erzeugung und Verbrauchern. Mit den Leitungen kommt nun eine zusätzliche Komponente hinzu, die separat betrachtet werden soll. Leitungen weisen grundsätzlich Eigenimpedanzen, Koppelimpedanzen und Leiter-Erde-Impedanzen auf. Die Leiter-Erde-Impedanzen können jedoch vernachlässigt werden. So hat jeder Leiter eine Eigenimpedanzen und zwei Koppelimpedanzen, also zu den jeweils anderen Leitern. Die Spannung für diese Berechnung wird definiert als Differenz der Spannungen am Anfang und am Ende der Leitung. So lässt sich die Matrix-Gleichung für ein Leitungssystem aufstellen:
\begin {align} \begin {bmatrix} \underline {U}_{\mathrm {L1A}}-\underline {U}_{\mathrm {L1B}} \\ \underline {U}_{\mathrm {L2A}}-\underline {U}_{\mathrm {L2B}} \\ \underline {U}_{\mathrm {L3A}}-\underline {U}_{\mathrm {L3B}} \end {bmatrix} = \begin {bmatrix} \underline {Z}_\mathrm {S} & \underline {Z}_\mathrm {K} & \underline {Z}_\mathrm {K} \\ \underline {Z}_\mathrm {K} & \underline {Z}_\mathrm {S} & \underline {Z}_\mathrm {K} \\ \underline {Z}_\mathrm {K} & \underline {Z}_\mathrm {K} & \underline {Z}_\mathrm {S} \end {bmatrix} \cdot \begin {bmatrix} \underline {I}_{\mathrm {L1}} \\ \underline {I}_{\mathrm {L2}} \\ \underline {I}_{\mathrm {L3}} \end {bmatrix} \end {align}
Daraus kann wieder eine Kompaktschreibweise abgeleitet werden (Mit \(U_{\mathrm {L1A}}-U_{\mathrm {L1B}}=U_{\mathrm {L1}}\), ...): \begin {align} \begin {bmatrix} \underline {U}_{\mathrm {L1L2L3}} \end {bmatrix} = \begin {bmatrix} \underline {Z}_{\mathrm {L1L2L3}} \end {bmatrix} \cdot \begin {bmatrix} \underline {I}_{\mathrm {L1L2L3}} \end {bmatrix} \end {align}
Es liegt nun eine sehr ähnliche Gleichung vor, wie die bei den symmetrischen Verbrauchern. Auch hier soll die Gleichung so umgeformt werden, dass eine direkte Abhängigkeit von Originalsystem und Transformationssystem vorliegt. Da die Gleichung grundlegend gleich aufgebaut ist, können die gleichen Erweiterungen und Umformungen durchgeführt werden, wie bereits bei den symmetrischen Verbrauchern: \begin {align} \begin {bmatrix} \underline {Z}_{012} \end {bmatrix} = \begin {bmatrix} \underline {Z}_\mathrm {S}+2\cdot \underline {Z}_\mathrm {K} & 0 & 0 \\ 0 & \underline {Z}_\mathrm {S}-\underline {Z}_\mathrm {K} & 0 \\ 0 & 0 & \underline {Z}_\mathrm {S}-\underline {Z}_\mathrm {K} \end {bmatrix} \end {align} Wichtig ist bei der Umformung immer, dass die umgeformte Impedanzmatrix nur aus Werten auf der Hauptdiagonale besteht, damit es nur direkte Zusammenhänge zwischen den einzenlen Leitern und den Transformationssytemen gibt.
Abb. 4 zeigt das ESB der drei Systeme für symmetrische Leitungen. Die gestrichelte Leitung soll die Sternpunktbehandlung auf Erzeugungs- und Verbraucherseite widerspiegeln zur Referenz der Sternspannungen.

Mehrphasensysteme - Mitsystem, Gegensystem und Nullsystem
Scheinleistung, Wirkleistung und Blindleistung...